

DK4-BZ-002
Mikro etengailua 3 pineko SPDT mini muga-etengailua 10A 250VAC errodadura-arku palanka arintzeko ekintza-bultzada mikro etengailuak
| (Funtzionamenduaren ezaugarri nagusiak) | (Funtzionamendu-parametroa) | (Laburdura) | (Unitateak) |
|
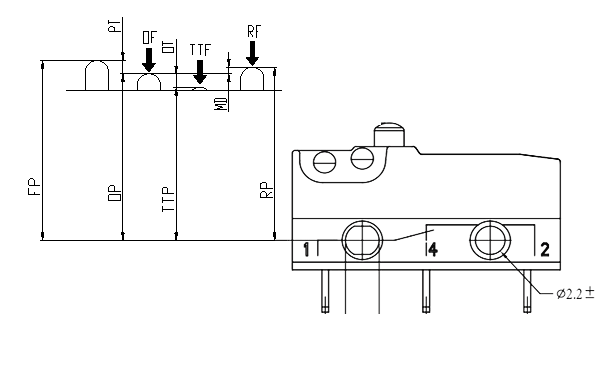
| (Posizio librea) | FP | mm |
| (Lan-posizioa) | OP | mm | |
| (Askatzeko posizioa) | RP | mm | |
| (Bidaia-posizio osoa) | TTP | mm | |
| (Indar eragilea) | OF | N | |
| (Indarra Askatzea) | RF | N | |
| (Bidaia-indarra guztira) | TTF | N | |
| (Bidaia aurretik) | PT | mm | |
| (Bidaia Gehiegi) | OT | mm | |
| (Mugimendu Diferentziala) | MD | mm |
Aldagailuaren ezaugarri teknikoak
| (ELEMENTUA) | (parametro teknikoa) | (Balioa) | |
| 1 | (Sailkapen elektrikoa) | 10 (1,5) A 250 V CA | |
| 2 | (Kontaktu-erresistentzia) | ≤50mΩ (Hasierako balioa) | |
| 3 | (Isolamendu Erresistentzia) | ≥100MΩ (500VDC) | |
| 4 | (Tentsio dielektrikoa) | (konektatu gabeko terminalen artean) | 500V/0.5mA/60S |
| (terminalen eta metalezko markoaren artean) | 1500V/0.5mA/60S | ||
| 5 | (Bizitza Elektrikoa) | ≥10000 ziklo | |
| 6 | (Bizitza Mekanikoa) | ≥3000000 ziklo | |
| 7 | (Funtzionamendu-tenperatura) | -25~105℃ | |
| 8 | (Funtzionamendu-maiztasuna) | (elektrikoa): 15zikloak(Mekanikoa): 60zikloak | |
| 9 | (Bibrazioen aurkakoa) | (Bibrazio-maiztasuna): 10 ~ 55 Hz; (Anplitudea): 1,5 mm; (Hiru norabide): 1H | |
| 10 | (Soldatzeko gaitasuna): (Murgildutako zatiaren % 80 baino gehiago soldaduraz estalita egon behar da) | (Soldadura tenperatura): 235 ± 5 ℃ (Murgiltze denbora): 2 ~ 3 s | |
| 11 | (Soldaduraren beroarekiko erresistentzia) | (Murgiltze bidezko soldadura): 260 ± 5 ℃ 5 ± 1S (Eskuzko soldadura): 300 ± 5 ℃ 2 ~ 3S | |
| 12 | (Segurtasun Onarpenak) | UL, CSA, TUV, ENEC | |
| 13 | (Proba-baldintzak) | (Giro-tenperatura): 20 ± 5 ℃ (Hezetasun erlatiboa): % 65 ± 5 RH (Airearen presioa): 86~106KPa | |
Mikroetengailuaren funtzionamendu-fluxu orokorraren azterketa
Mikroetengailuaren funtzionamendu-prozesu orokorra zehatz-mehatz azaltzen da:
①OF funtzionamendu-presioa: Botoiari edo eragingailuari gehitzen zaio etengailuak aurreranzko ekintzarako (zirkuitua konektatzea edo deskonektatzea) behar den indar maximoa sortzeko.
②Alderantzizko funtzionamendu-indarra RF: Botoiak edo eragingailuak jasan dezakeen gutxieneko indarra etengailua alderantziz dagoenean (zirkuitura deskonektatuta edo konektatuta dagoenean).
③Kontaktu-presioa TF: Botoia edo eragingailuaren zatia posizio librean dagoenean kontaktu-puntu estatikoaren presioa, edo botoiaren eragingailuaren zatia muga-posizioan dagoenean kontaktu-puntu dinamikoaren presioa.
④FP posizio librea: Botoiaren edo eragingailuaren punturik altuenetik etengailuaren muntaketa-zuloaren oinarri-lerrorainoko posizioa, etengailua egoera normalean dagoenean eta kanpoko indarrik jasaten ez duenean.
⑤Funtzionamendu-posizioa OP: Etengailu-botoia edo eragingailu-osagaia ekintza positiboan dagoenean, botoiaren edo eragingailu-osagaiaren punturik altuenetik etengailuaren muntaketa-zuloaren oinarrizko lerrorainoko posizioa.
⑥RP posizioa berrezarri: Etengailuaren botoia edo eragingailuaren osagaia alderantzizko mugimenduan dagoenean, botoiaren edo eragingailuaren osagaiaren punturik altuenetik etengailuaren muntaketa-zuloaren oinarrizko lerrorainoko posizioa.
⑦Mugimendu osoa TTP: Etengailu-botoiak edo eragingailu-osagaiak funtzionatzen duenean mugitzeko ahalmena duen gehienezko posizioa.
⑧ Ekintza-ibilbidearen PT: Etengailu-botoiaren edo eragingailuaren posizio libretik ekintza positiboko posiziora arteko gehienezko distantzia.
⑨ Gainkarga-ibilbidea OT: Etengailuaren botoia edo eragingailuaren osagaia ekintza positiboko posiziotik beherantz mugitzen jarraitzen du, eta etengailuaren errendimendu mekanikoa amaitzen edo kaltetzen ez duen muga-posiziorako distantziak normalean gutxieneko balioa hartzen du.





